






Для каждого выпуска узла должны быть указаны свойства, которые управляют передачей деформаций (и, следовательно, внутренних сил) между исходным узлом и его копией. Этот тип высвобождения узла описывает свойства соединения на невидимом стержне между двумя узлами.

Система координат
Освобождение смещений и вращений может быть связано с одной из следующих систем осей:
- Локальный стержень или линейная система осей x, y, z
- Общая система координат X,Y,Z
- Пользовательская система осей U, V, W
Если используется локальная система стержней или линейных осей, введите номер соответствующего объекта в разделе Система местных осей.
Условия типа высвобождения
Условия типа выпуска делятся на 'трансляционные' и 'вращательные' степени свободы. Первые описывают смещения в направлении местных или глобальных осей; последние описывают вращения вокруг этих осей.
Чтобы определить выпуск, установите флажок для соответствующей оси. Галочка означает, что объект можно перемещать или вращать в соответствующем направлении или вокруг него. Затем постоянная поступательной или поворотной пружины устанавливается на ноль. Вы можете настроить 'постоянную пружины' в любое время, чтобы смоделировать упругий шарнир. Введите жесткость пружины в качестве расчетных значений.
В столбце 'Нелинейность' вы можете отдельно управлять высвобождением для каждого компонента деформации. В зависимости от степени свободы для выбора доступны соответствующие записи в списке нелинейностей.
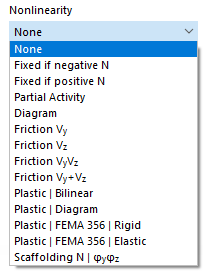
Нелинейности описаны в главе image@020167# для графического определения объекта.