В закладке Параметры и опции можно настроить значение ускорения свободного падения, геометрические допуски объектов и выравнивание осей.

Предпочтения
В данном разделе диалога можно задать значение 'Ускорения свободного падения' g. Он используется для определения собственного веса стержней и поверхностей, для преобразования масс и для динамического расчёта. Предварительно установлено приблизительное значение 10,00 м/с2.
Допуски модели
Однако при моделировании или импорте данных из программы CAD в объектах модели могут возникнуть небольшие геометрические различия. RFEM исправляет эти несоответствия автоматически, если конкретные расстояния ниже, чем поля 'Допуск'. Таким образом, узлы, расположенные очень близко друг к другу, будут объединены, линии или элементы, расположенные за пределами плоскостей, будут интегрированы в поверхности, а линии и элементы с минимальным наклоном будут классифицированы как вертикальные.
Предустановленные допуски подходят для большинства моделей. Потому у моделей небольших размеров может потребоваться соответствующая настройка допусков.
Опции
Параметры в этом диалоговом разделе определяют, используются ли в модели "репрезентанты" для стержней и блоков стержней или "ячейки поверхности".
Если активированы флажки 'Репрезентанты стержней' и 'Репрезентанты блоков стержней', Мастер{% доступных в диалоговом окне\} доступен. Если отмечен флажок 'Ячейки поверхности', программа автоматически распознает замкнутые частичные области поверхностей. Этот тип объекта описан в Разделе {%ref005237 Ячейки поверхности]]).
Общие оси XYZ
Этот раздел диалога управляет ориентацией глобальной оси Z. В программах CAD ось Z обычно направлена вверх, а в программах для расчета конструкций - вниз. К тому же, для расчета это не имеет никакого значения.
Если Z направлено вверх, то в загружении для функции 'Активный собственный вес' (см.|self-weight|раздел Загружения#).
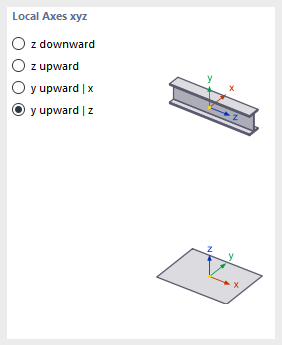
Местные оси xyz
Описания осей стержня регулируются в нормах по-разному. В этом разделе диалога можно задать ориентацию главных осей стержня z или y, а также ось поверхности z, чтобы привести местные системы координат в соответствие с местными конвенциями.
Позиции местных осей стержня и поверхности изображаются в графике диалога.