






Pro každé uvolnění uzlu je třeba zadat vlastnosti, které řídí přenos deformací (a tím i vnitřních sil) mezi původním uzlem a jeho kopií. Tento typ uvolnění uzlu popisuje vlastnosti spoje na neviditelném prutu mezi dvěma uzly.

Souřadný systém
Uvolnění posunů a pootočení lze vztáhnout na jeden z následujících osových systémů:
- Lokální osový systém prutu nebo linie x, y, z
- Globální souřadný systém X, Y, Z
- Uživatelsky definovaný osový systém U, V, W
Pokud se jedná o lokální osový systém prutů nebo linií, zadejte v řezu Lokální osový systém číslo příslušného objektu.
Podmínky typu uvolnění
Podmínky typu uvolnění se dělí na 'translační' a 'rotační' stupně volnosti. První popisují posuny ve směru lokálních nebo globálních os; přičemž poslední z nich popisují pootočení okolo těchto os.
Pro zadání kloubu je třeba zaškrtnout příslušné osy. Označení znamená, že objekt lze posouvat nebo otáčet v příslušném směru nebo okolo něj. Poté se konstanta translační nebo rotační pružiny nastaví na nulu. ' Konstantu tuhosti ' je možné kdykoli upravit pro modelování pružného kloubu. Jako návrhové hodnoty se zadávají tuhosti pružin.
Ve sloupci 'Nelinearita' lze cíleně nastavit kloub pro každou deformační složku. V závislosti na stupni volnosti jsou v seznamu nelinearit k dispozici příslušné položky.
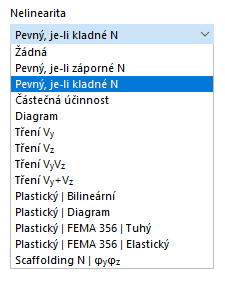
Tyto nelinearity jsou popsány v manuálu na koncích prutu.
Lokální osový systém
Tato sekce se zobrazí, pokud se podíl vztahuje na lokální souřadný systém. V seznamu vyberte, zda se má použít 'prut' nebo ' linie '. Poté zadejte číslo prutu nebo linie. Pomocí tlačítka
![]() můžeme objekt definovat i graficky.
můžeme objekt definovat i graficky.