






Para cada libertação de nó, tem de ser especificadas as propriedades que controlam a transferência de deformações (e, portanto, das forças internas) entre o nó original e a sua cópia. Este tipo de libertação de nó descreve as propriedades da ligação na barra invisível entre os dois nós.

Sistema de coordenadas
A libertação dos deslocamentos e as rotações pode estar relacionada com um dos seguintes sistemas de eixos:
- Barra local ou sistema de eixos de linha x, y, z
- Sistema de coordenadas global X,Y,Z
- Sistema de eixos definido pelo utilizador U,V,W
Se é utilizado uma barra local ou um sistema de eixos de linha, introduz o número do objeto correspondente na secção Sistema de eixos local.
Condições do tipo de libertação
As condições do tipo de libertação são divididas em graus de liberdade de 'translacional' e 'Rotacional'. Os primeiros descrevem os deslocamentos na direção dos eixos locais ou globais; as últimas descrevem as rotações em torno desses eixos.
Para definir uma libertação, seleccione a caixa de selecção para o respectivo eixo. A seleção simboliza que um objeto pode ser movido ou rodado na direção correspondente ou à sua volta. De seguida, a constante da mola de translação ou de rotação é definida como zero. Pode ajustar a 'Constante de mola' a qualquer momento para modelar uma articulação elástica. Introduz a rigidez da mola como valor de cálculo.
Na coluna 'Não-linearidade', pode controlar especificamente a libertação para cada componente de deformação. Dependendo do grau de liberdade, estão disponíveis entradas correspondentes para seleção na lista de não linearidades.
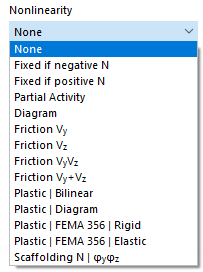
As não linearidades são descritas no capítulo Articulações de extremidade de barra descritas.
sistema de eixos local
Esta secção é apresentada quando a partilha se refere a um sistema de coordenadas local. Seleccione a partir da lista se deve ser utilizada uma 'barra' ou uma 'linha' como referência. Em seguida, introduz o número da barra ou linha. Também pode utilizar o botão
![]() para definir o objecto graficamente.
para definir o objecto graficamente.