






Puede mostrar los resultados para sólidos gráficamente utilizando la categoría del navegador Sólidos. Los resultados numéricos de los sólidos se encuentran en la categoría de tabla Resultados por sólido.
.png?mw=760&hash=71627fe33fddc42ab64faca4d036ceecb28da92c)
Deformaciones
La imagen Resultados por sólido en la tabla muestra la tabla con las deformaciones de las superficies de contorno. Los desplazamientos y giros se muestran en los puntos de rejilla de la superficie (ver Capítulo Superficies ).
Las deformaciones tienen el siguiente significado:
| |u| | Valor absoluto del desplazamiento total |
| uX | Desplazamiento en dirección del eje X global |
| uY | Desplazamiento en dirección del eje Y global |
| uZ | Desplazamiento en dirección del eje Z global |
| φX | Giro respecto al eje X global |
| φY | Giro respecto al eje Y global |
| φZ | Giro respecto al eje Z global |
Tensión
.png?mw=760&hash=b95435bbf9c07c7f89896b47d2be8a7f2444ee35)
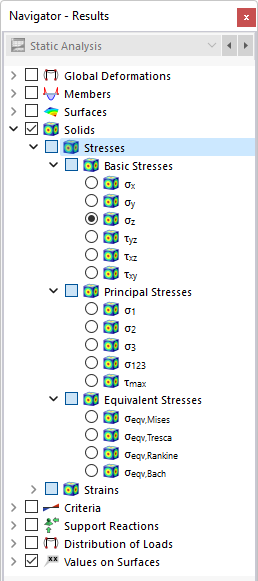
En el navegador, defina las tensiones que se mostrarán en las superficies de contorno de los sólidos. La tabla enumera las tensiones de estas superficies según las especificaciones establecidas en el Administrador de tablas de resultados .
Las tensiones en sólido se dividen en las siguientes categorías:
- Tensiones básicas
- Tensiones principales
- Tensiones equivalentes
A diferencia de las tensiones de la superficie, las tensiones de los sólidos no se pueden describir mediante ecuaciones simples. Las tensiones básicas σx, σyyσz, incluidas las tensiones tangencialesτyz,τxz yτxy, se determinan directamente mediante el núcleo de análisis.
Si un cubo con longitudes de borde dx, dy, y dz se corta a partir de un objeto 3D con carga multiaxial, las tensiones en cada superficie cúbica se pueden dividir en tensiones normales y tangenciales. Si no se consideran diferencias ni de fuerza espacial ni de tensión en las superficies paralelas, la condición de tensión en el sistema local de coordenadas del cubo se puede describir mediante nueve componentes de tensión.
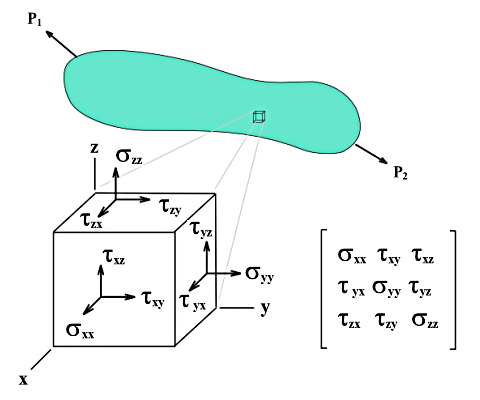
La matriz del tensor de tensiones es la siguiente:
Las tensiones principales σ1, σ2, y σ3 resultan de los valores propios del tensor de la siguiente manera:
La tensión tangencialmáxima τmax se determina según el círculo de Mohr':
Las tensiones equivalentesσv según
von Mises
se puede determinar mediante dos fórmulas equivalentes.
Para determinar la tensión equivalente σv según Tresca , se examinan las diferencias con las tensiones principales a fin de determinar el valor máximo.
La tensión equivalente σv según Rankine se determina a partir de los mayores valores absolutos de las tensiones principales.
Para determinar la tensión equivalente σv según Bach , se examinan las diferencias entre tensiones principales considerando el coeficiente de Poisson a fin de determinar el valor máximo.
deformaciones
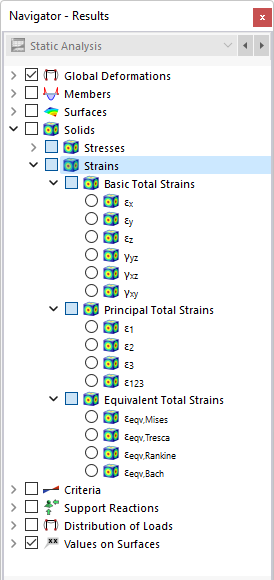

En el navegador, defina las deformaciones que se mostrarán en las superficies de contorno de los sólidos. La tabla enumera las deformaciones de estas superficies según las especificaciones establecidas en el Administrador de tablas de resultados .
Las deformaciones en sólido se dividen en las siguientes categorías:
- Deformaciones totales básicas
- Deformaciones totales principales
- Deformaciones totales equivalentes
Las deformaciones totales básicas, junto con las deformaciones tangenciales, las determina directamente el núcleo de cálculo. La definición general del tensor para el estado de la deformación espacial es la siguiente:
Los elementos del tensor se definen de la siguiente manera:
Las deformaciones totales principales ε1, ε2 y ε3 se determinan a partir de las deformaciones básicas.
Las deformaciones totales equivalentes εv se determinan según cuatro hipótesis de tensión diferentes como a continuación.
|
R |
Matriz (ver a continuación) |
|
R |
Matrix (siehe unten) |
|
R |
Matriz (ver a continuación) |