






Vous pouvez afficher graphiquement les résultats des solides à l'aide de la catégorie Solides du navigateur. Les résultats numériques des solides se trouvent dans la catégorie de tableau Résultats par solide.

Déformations
L'image Résultats par solide dans le tableau affiche le tableau avec les déformations des surfaces aux limites. Les déplacements et les rotations sont affichés dans les points de grille de surface (voir le chapitre Surfaces ).
Les déformations ont la signification suivante :
| u | Valeur absolue du déplacement total | ||
| uX | Déplacement en direction de l'axe global X | ||
| uY | Déplacement en direction de l'axe global Y | ||
| uZ | Déplacement en direction de l'axe global Z | ||
| φX | Rotation autour de l'axe global X | ||
| φY | Rotation autour de l'axe global Y | ||
| φZ | Rotation autour de l'axe global Z |
Contraintes
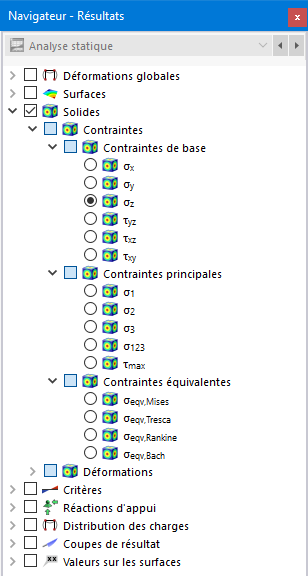

Dans le navigateur, définissez les contraintes à afficher sur les surfaces aux limites des solides. Le tableau répertorie les contraintes de ces surfaces selon les spécifications spécifiées dans le Gestionnaire du tableau de résultats .
Les contraintes du solide sont réparties dans les catégories suivantes :
- Contraintes de base
- Contraintes principales
- Contraintes équivalentes
Contrairement aux contraintes de surface, les contraintes de solide ne peuvent pas être décrites par des équations simples. Les Contraintes de base σx, σy et σz, y compris les contraintes de cisaillement τyz, τxz et τxy sont déterminées directement par le noyau de calcul.
Si un cube avec des côtés de longueur dx, dy et dz est extrait d'un objet 3D avec chargement multi-axial, les contraintes dans chaque surface cubique peuvent être divisées en contraintes normales et de cisaillement. Si ni la force spatiale, ni les différences de contrainte sur les surfaces parallèles ne sont considérées, la condition de contrainte dans le système de coordonnées local du cube peut être décrite par neuf composants de contrainte.
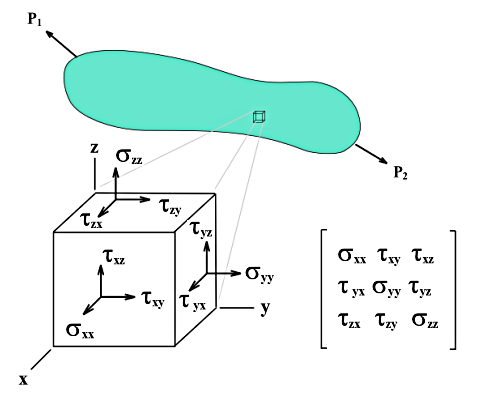
La matrice du tenseur de contrainte est la suivante :
Les Contraintes principales σ1, σ2 et σ3 résultent des valeurs propres du torseur comme suit :
La contrainte de cisaillementmaximale τmax est déterminée selon le cercle de Mohr' :
Les contraintes équivalentes σv selon
von Mises
peuvent être déterminées par deux formules équivalentes.
Pour déterminer la contrainte équivalente σv selon Tresca , les différences par rapport aux contraintes principales sont examinées afin de déterminer la valeur maximale.
La contrainte équivalente σv selon Rankine est déterminé à partir des valeurs absolues les plus élevées des contraintes principales.
Pour déterminer la contrainte équivalente σv selon Bach , les différences de contraintes principales sont examinées en tenant compte du coefficient de Poisson afin de déterminer la valeur maximale.
Déformations
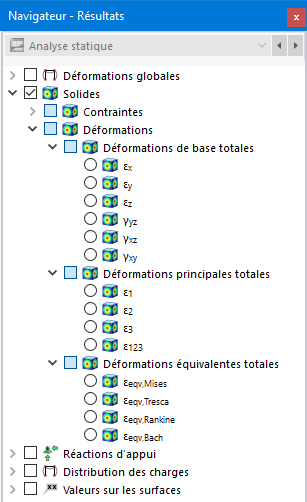

Dans le navigateur, définissez les déformations à afficher sur les surfaces aux limites des solides. Le tableau répertorie les déformations de ces surfaces selon les spécifications du Gestionnaire du tableau de résultats .
Les déformations du solide sont réparties dans les catégories suivantes :
- Déformations de base totales
- Déformations principales totales
- Déformations équivalentes totales
Les Déformations de base totales, y compris les déformations de cisaillement, sont déterminées directement par le noyau de calcul. La définition générale du tenseur pour un état de déformation 3D est la suivante :
Les éléments du tenseur sont définis comme suit :
Les Déformations principales totales ε1, ε2 et ε3 sont déterminées à partir des déformations de base.
Les déformations équivalentes totales εv sont déterminées selon quatre hypothèses de contrainte :
|
R |
Matrice (voir ci-dessous) |
|
R |
Matrice (voir ci-dessous) |