






Pour chaque Libération de ligne, il convient de définir les propriétés qui régissent le transfert des déformations (et par conséquent des efforts internes) entre la ligne originale et sa copie. Ce type de libération de ligne décrit les propriétés de l'articulation des barres de connexion invisibles entre les nœuds FE des deux lignes.

Conditions du type de libération
Les conditions du type de libération sont divisées en trois degrés de liberté 'Translatoires' et une libération 'Rotatoire'. Les premiers décrivent les déplacements dans la direction des axes locaux, le dernier contrôle les rotations autour de l'axe longitudinal de la ligne.
Pour définir une libération, cochez la case de contrôle pour l'axe concerné. La coche symbolise que le déplacement ou la rotation d'un objet dans ou autour de la direction correspondante est possible. La constante de ressort de déplacement ou de rotation est alors fixée à zéro. Vous pouvez ajuster la 'Constante de ressort' à tout moment pour modéliser une articulation élastique. Entrez les rigidités de ressort comme valeurs nominales.
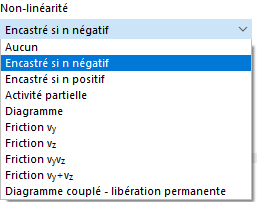
Dans la colonne 'Non-linéarité', vous pouvez gérer spécifiquement la libération pour chaque composante de déformation. Selon le degré de liberté, des entrées appropriées sont disponibles dans la liste des non-linéarités. Par exemple, avec le type Frottement , vous pouvez simuler les effets de frottement adhérent entre deux composants porteurs le long d'une ligne.
Système d'axes locaux
Choisissez dans la liste à quel système d'axes xyz les libérations se réfèrent :
- Ligne d'origine
- Barre sur la ligne d'origine : le système d'axes de la barre assignée à la ligne est utilisé.
- Axe Z perpendiculaire à la surface : sélectionnez la surface dans la liste dont l'axe local z est déterminant pour l'orientation des axes.
- Nœud auxiliaire : entrez le numéro du nœud ou déterminez-le graphiquement en utilisant le bouton
 . Sélectionnez ensuite le plan (x-y ou x-z) pour définir les axes.
. Sélectionnez ensuite le plan (x-y ou x-z) pour définir les axes.
Si nécessaire, vous pouvez encore faire pivoter la libération de ligne d'un angle β.
Options
Avec le champ de contrôle 'Rotation d'articulation φy et φz', vous pouvez fixer les degrés de liberté pour la rotation autour des axes y et z de la ligne à zéro. Dans la plupart des cas, cela n'a pas de signification pratique en construction car l'influence est négligeable. Cependant, pour des modélisations spécifiques, cette option peut être utile, par exemple pour un couvercle circulaire reposant sur un conteneur et ne transmettant que des forces verticales.