






Le type de contact entre surfaces contrôle les forces transférées entre deux groupes de surfaces parallèles (« Contacts entre surfaces »).

Dans la section « Type de contact », définissez les propriétés de contact perpendiculaires et parallèles aux surfaces.
Contact perpendiculaire aux surfaces
Dans la liste « Contact perpendiculaire aux surfaces », vous avez le choix entre trois options pour contrôler le transfert des forces entre les surfaces.
Transmission complète de l'effort
Les forces de traction et de compression sont transférées entre les surfaces.
Échec en traction
Le contact est libéré dès que les surfaces s'éloignent les unes des autres.
Échec en compression
Seules les forces de traction sont transférées entre les surfaces.
Contact parallèle aux surfaces
Les options de la liste « Contact parallèle aux surfaces » (voir l'image Nouveau type de contact entre surfaces) décrivent comment les efforts tranchants sont transférés entre les surfaces.
Rupture si le contact perpendiculaire aux surfaces est en échec
S'il n'y a pas de contact en traction ou en compression entre les surfaces, aucun effort tranchant n'est transféré.
Transmission complète de l'effort
Tous les efforts tranchants sont transférés, que le contact soit efficace ou non perpendiculairement aux surfaces.
Friction rigide
Dans l'onglet « Friction rigide », définissez les paramètres du contact parallèle aux surfaces.
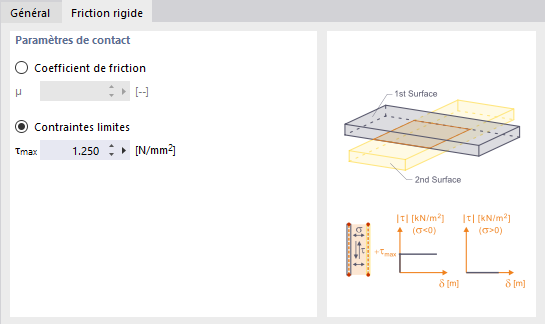
- Coefficient de friction μ : Les efforts tranchants transférés sont relatifs aux efforts normaux agissant perpendiculairement à la surface. Précisez le coefficient μ pour ce ratio de contraintes de cisaillement (τ = μ ⋅ |σ|).
- Contrainte limite τmax : Dès que la contrainte de cisaillement maximale admissible est atteinte, la contrainte n'est plus augmentée par l'augmentation de la déformation, mais elle reste constante.
La friction rigide est immédiatement efficace. La contrainte de cisaillement dépend de la contrainte normale. Le « Coefficient de friction » μ doit être spécifié.
Friction élastique
Dans l'onglet « Friction élastique », définissez les paramètres du contact parallèlement aux surfaces où l'effort tranchant augmente proportionnellement à la déformation. L'entrée est similaire à l'affichage montré dans l'image Friction rigide. Un comportement élastique étant représenté, il est également nécessaire de préciser la constante de rigidité en cisaillement C. Elle représente la force nécessaire pour déplacer une aire de 1 m2 sur 1 m.
Comportement de surface élastique
Dans l'onglet « Comportement élastique », définissez les paramètres du contact parallèle aux surfaces.
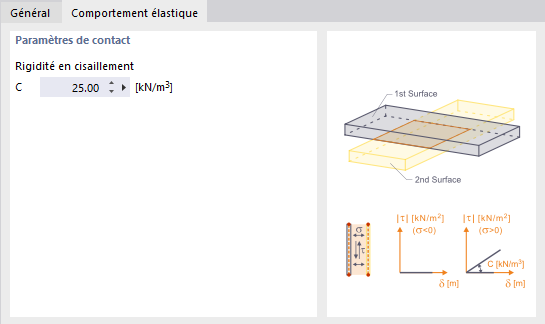
Spécifiez la rigidité en cisaillement C du ressort pour décrire la propriété de transfert élastique des efforts tranchants.