






È possibile visualizzare graficamente i risultati per i solidi utilizzando la categoria del navigatore Solidi. I risultati numerici dei solidi si trovano nella categoria della tabella Risultati per solido.
.png?mw=760&hash=71627fe33fddc42ab64faca4d036ceecb28da92c)
Ordito
L'immagine Risultati per solido nella tabella mostra la tabella con gli spostamenti generalizzati delle superfici al contorno. Gli spostamenti e le rotazioni sono visualizzati nei punti della griglia della superficie (vedi Capitolo Superfici ).
Gli spostamenti generalizzati hanno i seguenti significati:
| u | Valore assoluto dello spostamento totale | ||
| uX | Spostamento in direzione dell'asse globale X | ||
| uY | Spostamento in direzione dell'asse globale Y | ||
| uZ | Spostamento in direzione dell'asse globale Z | ||
| φX | Rotazione attorno all'asse globale X | ||
| φY | Rotazione attorno all'asse globale Y | ||
| φZ | Rotazione attorno all'asse globale Z |
Tensione
.png?mw=760&hash=b95435bbf9c07c7f89896b47d2be8a7f2444ee35)
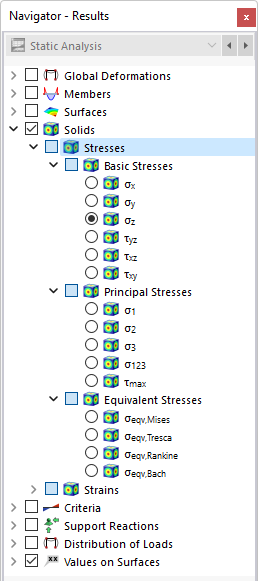
Nel navigatore, definisci le tensioni da visualizzare sulle superfici al contorno dei solidi. La tabella elenca le tensioni di queste superfici secondo le specifiche impostate nel Gestore tabelle dei risultati .
Le tensioni dei solidi sono suddivise nelle seguenti categorie:
- tensioni di base
- Tensioni principali
- Tensioni equivalenti
Diversamente dalle tensioni delle superfici, le tensioni dei solidi non possono essere descritte con semplici equazioni. Le tensioni di base σx, σy e σz comprese le tensioni tangenziali τyz, τxz e τxy sono determinate direttamente dal nucleo dell'analisi.
Se un cubo con le lunghezze dei bordi dx, dy e dz viene tagliato da un oggetto 3D con carico multiassiale, le tensioni in ciascuna superficie cubica possono essere suddivise in normali e tangenziali. Se non si prendono in considerazione né la forza spaziale né le differenze di tensione su superfici parallele, la condizione tensionale nel sistema di coordinate locali del cubo possono essere descritte da nove componenti.
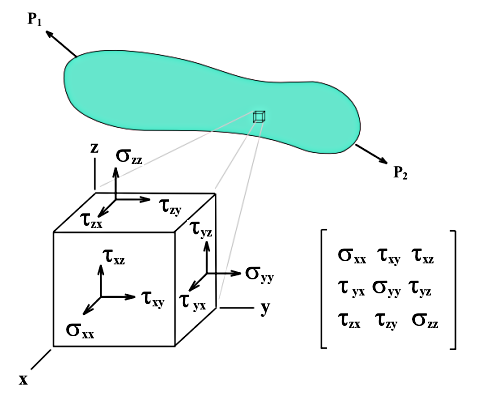
La matrice del tensore della tensione è la seguente:
Le tensioni principali σ1, σ2 e σ3 risultano dagli autovalori del tensore come segue:
La tensione tangenziale massima τmax è determinata secondo il cerchio di Mohr's:
Le tensioni equivalenti σv secondo
von Mises
può essere determinato con due formule equivalenti.
Per determinare la tensione equivalente σv secondo Tresca , vengono esaminate le differenze dalle tensioni principali per determinare il valore massimo.
La tensione equivalente σv secondo Rankine è determinato dai massimi valori assoluti delle tensioni principali.
Per determinare la tensione equivalente σv secondo Bach , vengono esaminate le principali differenze di tensione, tenendo conto del rapporto di Poisson's ν, al fine di determinare il valore massimo.
deformazioni
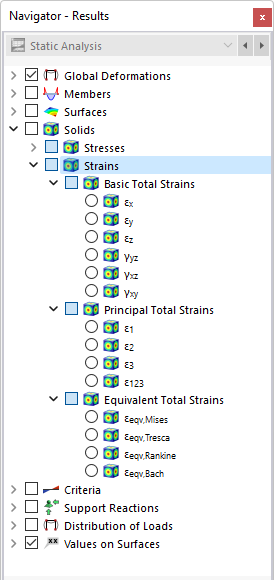

Nel navigatore, definisci le deformazioni da visualizzare sulle superfici al contorno dei solidi. La tabella elenca le deformazioni di queste superfici secondo le specifiche impostate nel Gestore tabelle dei risultati .
Le deformazioni dei solidi sono suddivise nelle seguenti categorie:
- Deformazioni totali di base
- Deformazioni totali principali
- Deformazioni totali equivalenti
Le deformazioni totali di base comprese le deformazioni a taglio sono determinate direttamente dal kernel di calcolo. La definizione generale del tensore per lo stato di deformazione spaziale è la seguente:
Gli elementi del tensore sono definiti come segue:
Le principali deformazioni totali ε1, ε2 e ε3 sono determinate dalle deformazioni di base.
Le deformazioni totali equivalenti εv sono determinate secondo quattro diverse ipotesi di tensione come segue.
|
R |
Matrice (vedi sotto) |
|
R |
Matrice (vedi sotto) |