






Dla każdego zwolnienia węzła należy określić właściwości kontrolujące przenoszenie odkształceń (a tym samym sił wewnętrznych) między pierwotnym węzłem a jego kopią. Ten typ zwolnienia węzłowego opisuje właściwości przegubu na niewidocznym pręcie między dwoma węzłami.

Układ współrzędnych
Zwolnienie przemieszczeń i obrotów może być powiązane z jednym z następujących układów osi:
- Lokalny układ osi pręta lub linii x,y,z
- Globalny układ współrzędnych X,Y,Z
- Układ współrzędnych zdefiniowany przez użytkownika U,V,W
W przypadku zastosowania lokalnego układu osi pręta należy wprowadzić numer odpowiedniego obiektu w sekcji local-cs Lokalny układ osi .
Warunki typu zwolnienia
Warunki typu zwolnienia są podzielone na stopnie swobody 'Translacyjne' i 'Rotalne'. Te pierwsze opisują przemieszczenia w kierunku lokalnych lub globalnych osi, a drugie - obroty wokół tych osi.
Aby zdefiniować zwolnienie, należy zaznaczyć pole wyboru dla odpowiedniej osi. Znacznik wyboru wskazuje, że możliwe jest przemieszczenie lub obrót obiektu' względem odpowiedniego kierunku. Stała sprężyny translacyjnej lub obrotowej zostaje wówczas ustawiona na zero. 'Stałą sprężystości' można w każdej chwili zmienić, aby zamodelować przegub sprężysty. Sztywności sprężyste należy wprowadzić jako wartości obliczeniowe.
W kolumnie 'Nieliniowość' można sterować zwolnieniem dla każdej składowej deformacji. W zależności od stopnia swobody na liście nieliniowości dostępne są odpowiednie opcje.
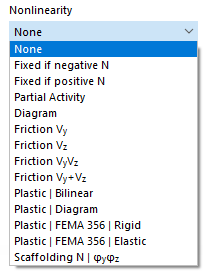
Nieliniowości są opisane w rozdziale #extbookmark
Lokalny układ osiowy
Ta sekcja okna dialogowego jest wyświetlana, jeżeli zwolnienie dotyczy lokalnego układu współrzędnych. Wprowadź numer pręta, który będzie używany jako odniesienie. Za pomocą klawisza
![]() można również graficznie zdefiniować pręt.
można również graficznie zdefiniować pręt.