






Pro každé uvolnění uzlu je třeba zadat vlastnosti, které řídí přenos deformací (a tím i vnitřních sil) mezi původním uzlem a jeho kopií. Tento typ uzlového uvolnění popisuje vlastnosti kloubu na neviditelném prutu mezi dvěma uzly.

Souřadný systém
Uvolnění posunů a pootočení lze vztáhnout na jeden z následujících osových systémů:
- Lokální osový systém prutu nebo linie x, y, z
- Globální souřadný systém X, Y, Z
- Uživatelsky definovaný osový systém U, V, W
Pokud se jedná o lokální osový systém prutu, zadejte v sekci local-cs Lokální osový systém číslo příslušného objektu.
Podmínky typu uvolnění
Podmínky typu uvolnění se dělí na 'translační' a 'rotační' stupeň volnosti. První popisují posuny ve směru lokálních nebo globálních os; přičemž poslední z nich popisují pootočení okolo těchto os.
Pro zadání kloubu je třeba zaškrtnout políčko u příslušné osy. Zaškrtnutí políčka znamená, že je možný posun nebo natočení objektu ' v příslušném směru. Poté se konstanta translační nebo rotační pružiny nastaví na nulu. ' Konstantu tuhosti ' je možné kdykoli upravit pro modelování pružného kloubu. Jako návrhové hodnoty se zadávají tuhosti pružin.
Ve sloupci 'Nelinearita' lze cíleně nastavit kloub pro každou deformační složku. V závislosti na stupni volnosti jsou v seznamu nelinearit k dispozici příslušné položky.
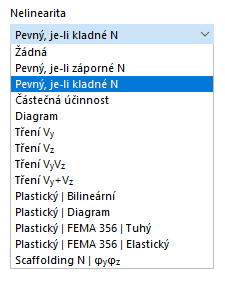
Tyto nelinearity jsou popsány v manuálu # extbookmark
Lokální osový systém
Tato sekce se zobrazí, pokud kloub odkazuje na lokální souřadný systém. Zadejte číslo prutu, který se má použít jako referenční. Prut lze zadat také graficky pomocí tlačítka
![]() .
.