Układ współrzędnych (UW) jest układem odniesienia do jednoznacznego definiowania obiektów w przestrzeni geometrycznej. Posiada zawsze początek układu współrzędnych. Na tej podstawie można precyzyjnie lokalizować obiekty w przestrzeni zgodnie z typem układu współrzędnych.
Typy układów współrzędnych w RFEM i RSTAB
- Kartezjański (X, Y, Z): Najpopularniejszy UW. Jest on definiowany przez trzy osie prostopadłe do siebie. X, Y, Z są zawsze rozwinięciami translacyjnymi.
- X-cylindryczny (X, R, φ): W tym przypadku można wyobrazić sobie walec, w którym wysokość osi odpowiada X. Punkty na walcu są określone przez wysokość (współrzędna X), promień walca (R) oraz kąt (φ).
- Y-cylindryczny (R, Y, φ): podobny do X-cylindryczny.
- Z-cylindryczny (R, φ, Z): podobny do X-cylindryczny.
- Biegunowe (R, φ, θ): Jest to sferyczny UW, w którym położenie węzła jest opisane odległością od początku układu współrzędnych (R) oraz kątami φ i θ.
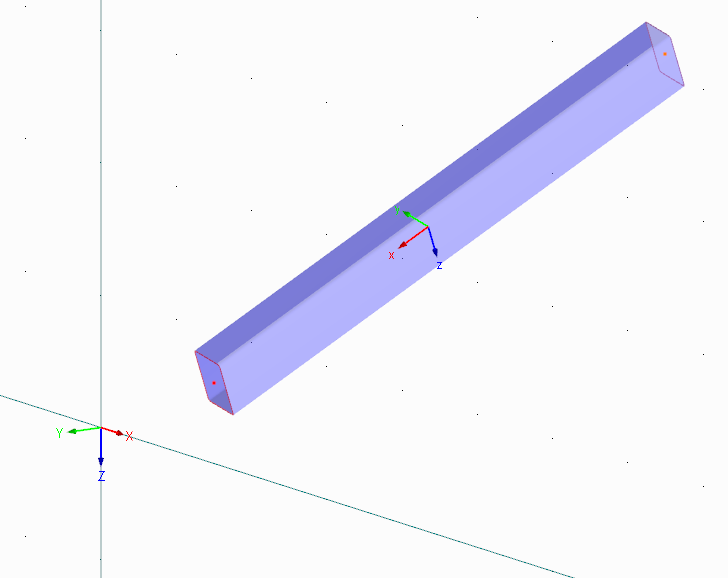
Ponadto rozróżnia się globalny i lokalny układ współrzędnych. Układy opisane powyżej definiują globalny UW. Lokalne układy współrzędnych są zazwyczaj specyficzne dla obiektu. W przeciwieństwie do globalnych UW są one oznaczone małymi literami.