






Une articulation de barre limite les efforts internes et les moments transférés d’une barre à l'autre. Les articulations ne peuvent être disposées qu’aux extrémités de barre et non à des emplacements le long de la barre.
Certains types de barre ont déjà des articulations : Un treillis, par exemple, ne transfère pas de moments. Un câble ne transfère ni moments ni efforts tranchants. Il est impossible d’assigner des articulations à de tels types de barre. L’entrée est bloquée.

Général
L’onglet Général gère les paramètres de base de l’articulation.
Système de coordonnées
Une articulation de barre peut être rapportée à l'un des systèmes d'axe suivants :
- Système d’axes de barre local x, y, z
- Système de coordonnées global X, Y, Z (en option, comme articulations ciseaux)
- Système d’axes défini par l’utilisateur U, V, W
En général, les articulations sont liées au système d’axes de barre local. Cependant, les articulations ciseaux (voir l’image Croisement de barre) ne sont possibles que dans le système d’axes global ou défini par l’utilisateur.
Conditions d’articulation
Les conditions d’articulation sont divisées en degrés de liberté « En translation » et « En rotation ». Les premiers décrivent les déplacements en direction des axes locaux ou globaux, les seconds décrivent les rotations autour de ces axes.
Pour définir une articulation, cochez la case de l’axe correspondant. La coche indique que le déplacement ou la rotation de la barre dans ou autour de la direction correspondante est possible. La constante du ressort de translation ou de rotation est alors défini comme zéro. Vous pouvez ajuster la « Constante de ressort » à tout moment afin de modéliser une articulation élastique. Entrez les rigidités de ressort comme valeurs de calcul.
Dans la colonne « Non-linéarité », vous pouvez contrôler spécifiquement le transfert des efforts internes et des moments pour chaque composant. Les entrées appropriées peuvent être sélectionnées dans la liste des non-linéarités en fonction du degré de liberté.

Encastré si l’effort interne est positif ou négatif
Cela vous permet de contrôler facilement si seuls les forces ou moments positifs ou négatifs sont transférés à l’extrémité de la barre. Par exemple, une articulation ux avec une non-linéarité « Encastré si N positif » a pour effet que les efforts de traction (positifs) peuvent être transférées à l'extrémité de la barre et les efforts de compression (négatifs) ne le peuvent pas. Ainsi, l’articulation est efficace pour les efforts normaux négatifs.
Dans le cas d’un système de coordonnées local, les efforts internes et les moments se réfèrent au système d’axes local de barre xyz.
Lorsque vous sélectionnez une non-linéarité différente, vous pouvez modifier les paramètres dans les onglets Activité partielle, Diagramme, Friction ou Diagramme de l’échafaudage.
options
Une « articulation ciseaux » est disponible dans le système de coordonnées global ou défini par l’utilisateur. Ce type d’articulation permet de modéliser les intersections des barres continues.
Exemple
Quatre barres sont assemblées à un nœud. Les barres transfèrent des moments dans leur « direction continue », mais pas à l’autre paire de barres. Seuls les efforts normaux et tranchants sont transférés dans le nœud.
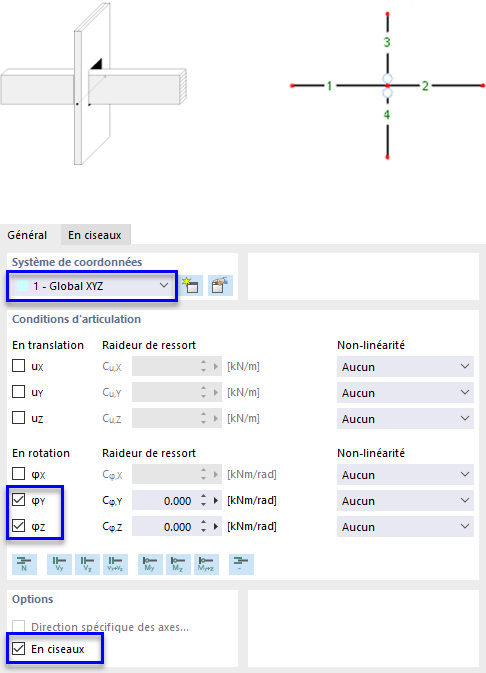
Assignez l’articulation aux barres 3 et 4 ou aux barres 1 et 2. L’autre paire de barres croisées ne reçoit pas d’articulation.
Activité partielle
L’activité partielle d’un composant d'articulation est disponible en tant que propriété non linéaire de l’articulation de barre (voir l’image Sélection de la non-linéarité de l’articulation).

Définissez l’effet de l’articulation pour la « Zone négative » et la « Zone positive ». La liste « Type » offre différents critères pour l’efficacité de l’articulation.
- Complète : grâce à l’articulation, le déplacement ou la rotation est possible dans son intégralité.
- Encastrée à partir du déplacement/de la rotation de la libération : l’articulation n’est efficace que jusqu’à un certain déplacement ou une certaine rotation. Si la limite est dépassée, un assemblage ou un maintien encastré devient efficace.
- Échec à partir de la force/du moment de libération : L’articulation n’est efficace que jusqu’à une certaine force ou un certain moment. Si la limite est dépassée, l’articulation se rompt et ne transfère plus l’effort interne ou le moment.
- Fluage à partir d’une force/d’un moment de libération : L’articulation n’est efficace que jusqu’à une certaine force ou un certain moment. Si elle est dépassée, les déformations augmentent encore, mais pas les efforts internes.
- Inefficacité du ressort : Dans le cas d’une articulation avec une rigidité de ressort, le composant d’articulation n’est pas efficace.
La plupart des types d’articulation peuvent être combinés avec un « Glissement », ce qui signifie que l’articulation ne devient efficace qu’après un certain déplacement ou une certaine rotation.
Diagramme
Le Diagramme d’un composant d’articulation est disponible en tant que propriété non linéaire de l’articulation (voir l’image Sélection de la non-linéarité de l’articulation).

Déterminez le nombre de points de définition pour le diagramme de travail en entrant les valeurs correspondantes dans la colonne « Déplacement » ou « Rotation ». Dans la colonne « Effort » ou « Moment », vous pouvez ensuite assigner aux coordonnées x des déplacements ou des rotations, les efforts ou moments de l’articulation.
Si l’ordre des points de définition est incorrect, vous pouvez trier les entrées par ordre croissant à l’aide du bouton
![]() .
.
Les critères suivants sont disponibles pour le « Début du diagramme » et la « Fin du diagramme » :
- Échec : l’articulation n’est efficace que jusqu’à la valeur maximale de l’effort ou du moment. Si elle est dépassée, l’effet d’articulation complet est atteint. Les efforts internes et les moments ne sont plus transférés.
- Plastification : l’articulation n’est efficace que jusqu’à la valeur maximale de l’effort ou du moment. Si elle est dépassée, les déformations augmentent encore, mais pas les efforts internes ou les moments.
- Continu : au-delà de la plage de définition, la raideur du ressort du dernier pas est appliquée.
- Arrêt : la déformation admissible est limitée à la valeur maximale du déplacement ou de la rotation. Si elle est dépassée, l’effet d'articulation est suspendu et un assemblage ou un maintien encastré devient efficace.
Frictions
La liste « Non-linéarité » propose quatre options pour définir la Friction d’une articulation en translation en fonction d’un autre composant d'articulation (voir l’image Sélection de la non-linéarité de l’articulation).

Les forces d’articulation transférées sont liées aux efforts normaux ou tranchants agissant dans une autre direction. Selon la sélection dans l’onglet « Général », la friction ne dépend que d’un ou deux efforts internes. La corrélation suivante existe entre la force de friction de l’articulation et l’effort normal ou tranchant :
Plastique
Les propriétés des articulations plastiques sont importantes pour les analyses pushover. Avec l’option Plastique d’un composant d’articulation agissant de manière non linéaire, quatre options sont disponibles (voir l’image Sélection d’une non-linéarité d’articulation) :
- Bilinéaire
- Diagramme
- FEMA 356 | Rigide
- FEMA 356 | Élastique

Dans les colonnes « Effort interne »/« Effort interne fluage » et « δ/δfluage » ou « φ/φfluage », définissez les valeurs caractéristiques des zones plastiques. Avec une valeur pour My/My,fluage de 1,27, par exemple, la section commence à céder lorsque le moment plastique est dépassé. Si 127 % de la résistance plastique sont dépassés, la barre est en rupture.
Les efforts internes limites plastiques sont déterminés automatiquement à partir des propriétés de section de la barre.
La longueur de barre affecte le calcul de la rigidité de l'articulation plastique. Cette valeur est généralement reconnue automatiquement à partir des longueurs des barres auxquelles l'articulation est assignée. Si nécessaire, vous pouvez spécifier une « Longueur de barre définie par l’utilisateur » pour l’articulation.
Critères d’acceptation
Dans la partie inférieure de la boîte de dialogue, vous pouvez définir les valeurs limites des critères d’élasticité devant s'appliquer à la sécurité du bâtiment. Celles-ci sont décrites, par exemple, pour les composants en acier dans le Tableau 5-5 de la norme FEMA 356 (norme ASCE) [1]. Ainsi, avec une valeur de 6,000 pour φ/φélaticité, la valeur critique pour la « Sécurité de vie » est atteinte dès que les déformations plastiques sont six fois supérieures à celles qui surviennent lorsque la limite d'élasticité est atteinte.
Les zones des critères d’acceptation sont également indiquées dans le diagramme.
Pour l'une des deux options FEMA plastique, les critères d’acceptation sont prédéfinis selon les spécifications de la norme américaine. Vous pouvez les ajuster si nécessaire en cochant la case « Défini par l’utilisateur ».

Indiquez le « Type de composant » dans la liste. Les critères d’acceptation des composants primaires et secondaires sont définis dans le Tableau 5-5 [1].
L’article technique Articulations plastiques dans RFEM 6 décrit comment utiliser une articulation plastique dans une analyse pushover.
Diagramme de l’échafaudage
Le diagramme de l’échafaudage d’un composant d’articulation est disponible en tant que propriété non linéaire de l’articulation (voir l’image Sélection de la non-linéarité de l’articulation). Cela vous permet de modéliser l’action mécanique d’un assemblage tubulaire avec un tronçon interne entre deux barres. Le modèle équivalent transfère le moment fléchissant via un tube externe trop sollicité et après avoir fixé positivement via le tronçon interne, en fonction de l’état de compression de la fin de barre.
Vous pouvez définir les propriétés de l’articulation dans les onglets « Diagramme d’échafaudage | Tube interne » et « Diagramme d’échafaudage | Tube externe » séparément.

Les options décrites dans la section diagramme de la boîte de dialogue sont disponibles pour la définition des paramètres.
