На вкладке « Настройки и параметры » вы можете настроить значение ускорения свободного падения, геометрические допуски объектов и выравнивание осей.

Предпочтения
Этот раздел диалога управляет значением 'ускорения свободного падения' g. Он используется для определения собственного веса стержней, преобразования масс, а также для динамического анализа. Предварительно установлено приблизительное значение 10,00 м/с2.
Допуски модели
При моделировании или импорте данных из программы САПР в объектах модели могут возникать небольшие геометрические различия. RSTAB автоматически исправляет эти несоответствия, если определенные расстояния не достигаются. Например, узлы, расположенные очень близко друг к другу, объединяются, элементы, расположенные за пределами плоскостей, объединяются в соответствующие плоскости или элементы с минимальным наклоном классифицируются как вертикальные.
Предустановленные допуски подходят для большинства моделей. В случае небольших размеров модели может потребоваться соответствующая корректировка допусков.
Опции
В этом разделе диалога вы можете решить, хотите ли вы применить «представителей» к стержням и наборам стержней в модели. При установке флажков 'Представители участников' и 'Представители групп участников' в диалоговое окно добавляются соответствующие вкладки. Они описаны в главах Помощник представителя группы и Помощник представителя группы элементов .
Общие оси XYZ
Этот раздел диалога управляет ориентацией глобальной оси Z. В программах САПР ось Z обычно направлена вверх, а в программах расчета конструкций - вниз. Это не имеет отношения к расчету.
Если Z направлена вверх, функция 'активного собственного веса' в загружении (см. Главу # extbookmark
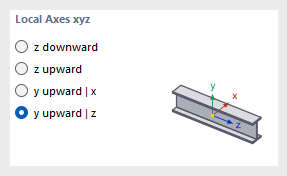
Местные оси xyz
Описания осей стержней регулируются по-разному в стандартах. В этом разделе диалога вы можете определить, как ориентированы оси главного стержня z или y, а также ось поверхности z, чтобы адаптировать локальные системы осей к региональным соглашениям.
Положение местных осей стержня показано на рисунке в этом разделе.