选择或指定相应自由度的弹簧常数,以减小在相应方向上的力传递。 力矩铰链或旋转弹簧减小了围绕定义轴的力传递。 在这种情况下,跟随轴系适用。
x: 线的纵向
自由度üX降低沿表面边缘和φx对应的力传递到铰链关节。
y: 与曲面相切
y轴垂直于线铰的纵向方向,并且位于最后一个有限元行的平面上。
z: 垂直于面
对于弯曲面,z坐标对应于线铰之前最后一个有限元行的z轴的线铰。
选择或指定相应自由度的弹簧常数,以减小在相应方向上的力传递。 力矩铰链或旋转弹簧减小了围绕定义轴的力传递。 在这种情况下,跟随轴系适用。
x: 线的纵向
自由度üX降低沿表面边缘和φx对应的力传递到铰链关节。
y: 与曲面相切
y轴垂直于线铰的纵向方向,并且位于最后一个有限元行的平面上。
z: 垂直于面
对于弯曲面,z坐标对应于线铰之前最后一个有限元行的z轴的线铰。
Fröhlich 先生为我们的客户提供技术支持,负责钢筋混凝土结构领域的研发工作。




![膜结构的基本形状[1]](/zh/webimage/009595/2419509/01-png.png?mw=512&hash=fe42d914122820fe3c92f9595d4d91afce8a2c07)
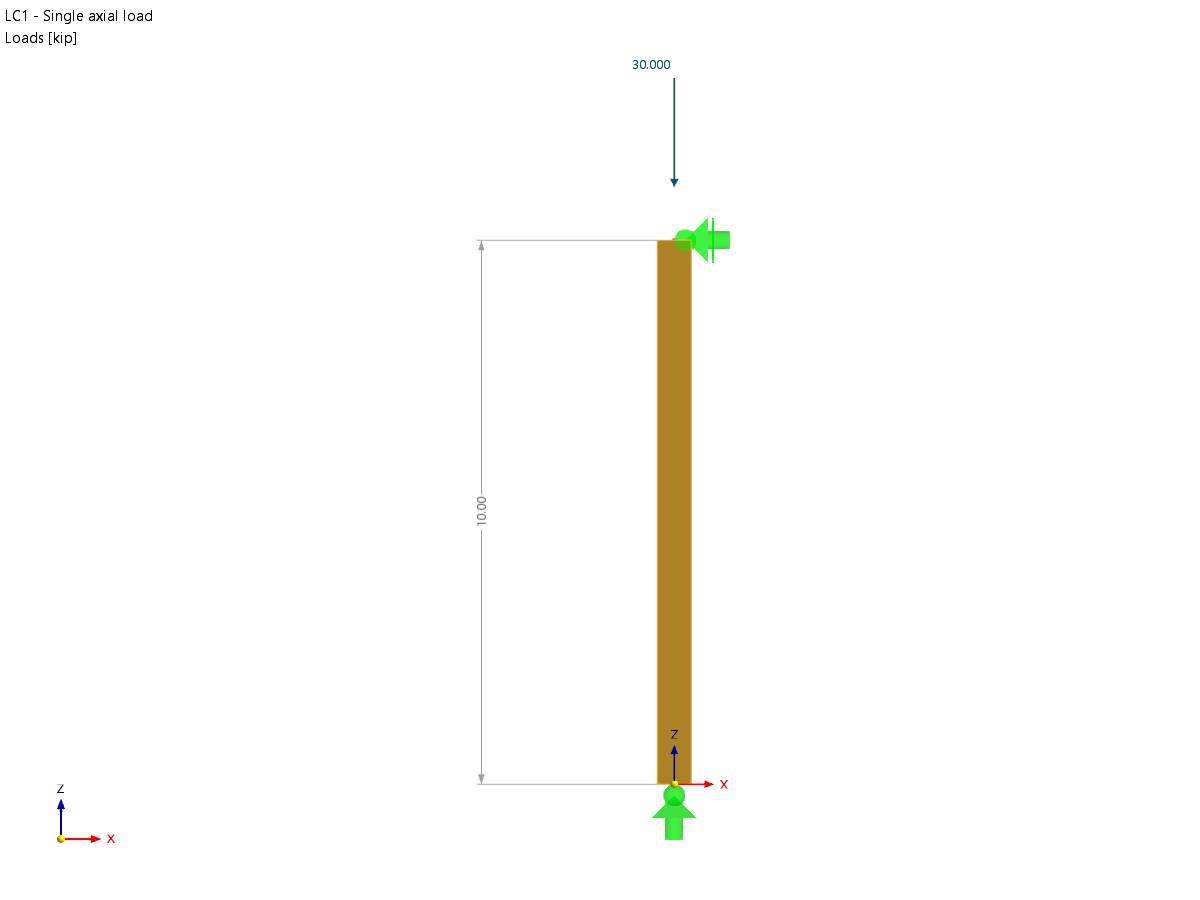

实体应力的结果可以在有限元中显示为彩色的三维点。
.png?mw=512&hash=ea9bf0ab53a4fb0da5c4ed81d32d53360ab2820c)
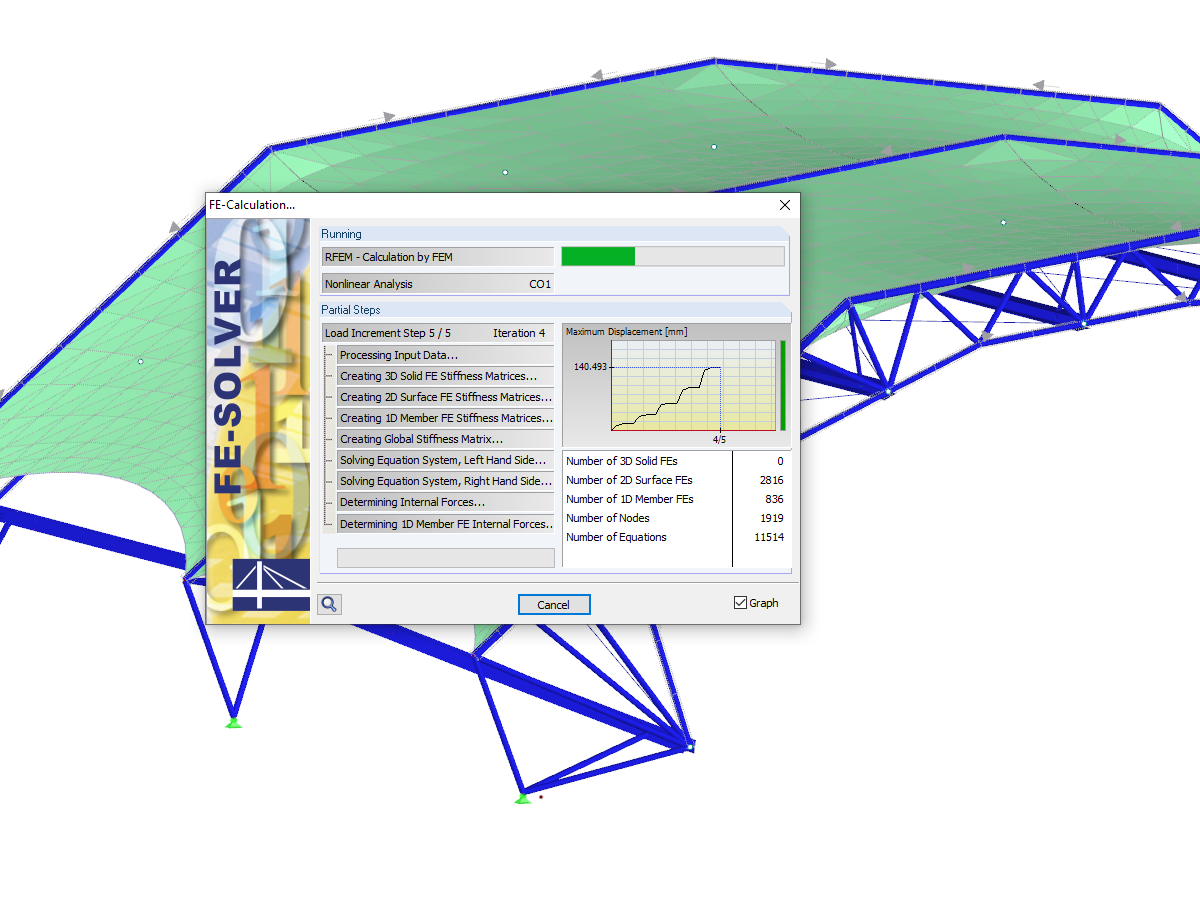
RFEM 中节点自由度数目不再是全局计算参数( 3D 模型中每个网格节点 6 个自由度,在翘曲扭转分析中为 7 个自由度)。 每个节点通常被认为有不同数量的自由度,从而在计算中导致方程的数目是可变的。
这种修改可以提高计算速度,特别是对于可以显著简化结构体系的模型(例如桁架和膜结构)。

在 RFEM 中的结果导航器和表 4.0 中可以显示杆件、面和实体的扩展应变(例如重要的主应变、等效总应变等)。
例如,在进行面单元连接的塑性设计时显示主要的塑性应变。
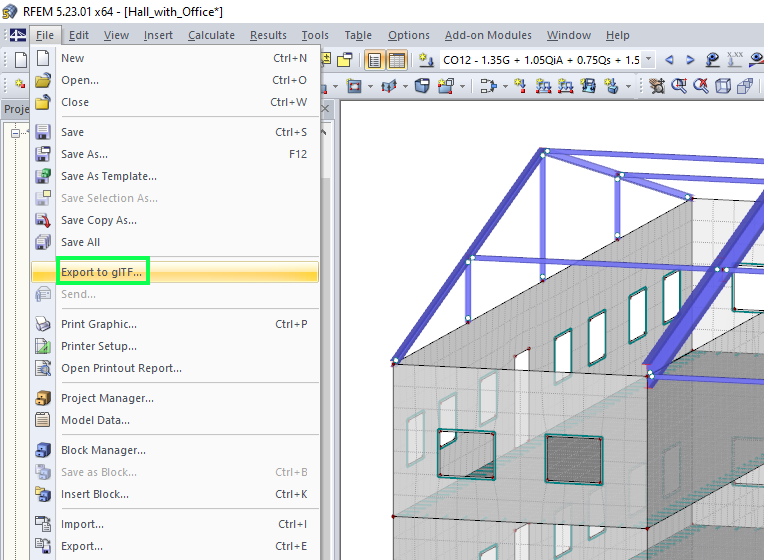
RFEM 和 RSTAB 模型可以另存为 3D glTF 模型(*.glb 和 *.glTF 格式)。 然后在谷歌或 Baylon 的 3D 查看器中详细查看。 戴上虚拟现实眼镜(例如 Oculus)可以“漫步”在结构中。
用户可以按照说明书通过 JavaScript 将 3D glTF 模型集成到自己的网站中(例如在德儒巴网站下载结构分析模型): “在网络和 AR 中轻松显示交互式 3D 模型” .



























_1.jpg?mw=350&hash=ab2086621f4e50c8c8fb8f3c211a22bc246e0552)







