






回复:
这种伸缩臂的嵌套部件通过机械方式在构件间传递力。
针对这种特殊的力传递方式,可在 RSTAB 9 中采用以下建模方案:
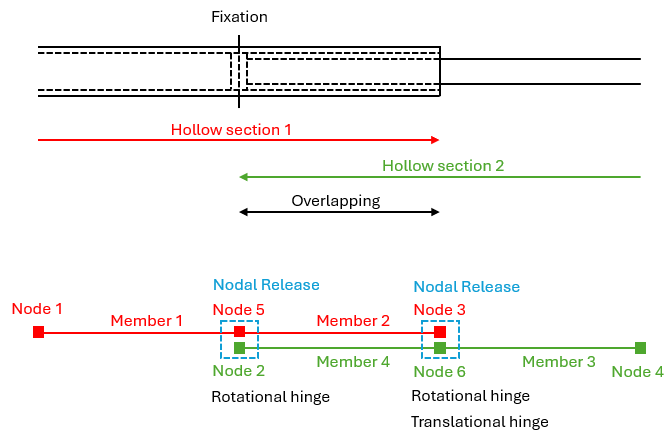
图中四根杆件组成的套接连接,在重叠区域存在两根叠加杆件(杆2与杆4)。
可以通过节点释放功能实现重叠杆件建模。为此,在节点2处定义节点释放,释放杆1与杆2之间的约束。由此自动生成新节点 5,作为杆1的末端节点和杆2的起始节点。杆1和杆2为刚性连接。

重叠杆件4可以在节点2和节点3之间定义。在节点3处同样定义节点释放,释放杆3与杆4之间的约束。生成新节点6,作为杆4的末端节点和杆3的起始节点。杆3和4为刚性连接。

为了确保力如真实结构一样仅在重叠杆件的两端通过力偶传递,需要在节点释放中定义节点2和5以及节点3和6之间的耦合条件。


在节点2与5之间,以及节点3和节点6之间设置弯矩铰。确保红色杆件(杆1和杆2)与绿色杆件(杆3和杆4)之间的弯矩通过重叠杆件端部的力偶传递。
在节点3和6之间设置轴力铰,节点释放中的轴力铰确保轴向力负荷仅在规划的红色和绿色杆组的固定处传递。