Ответ:
Например, вложенные компоненты телескопической стрелы строительной машины передают свои силы механически между компонентами.
Эту специальную передачу силы можно решить в RSTAB 9 следующим образом:
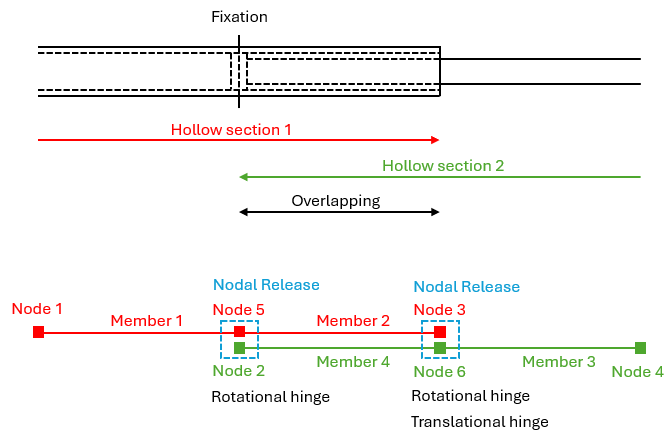
Штекерное соединение, подобное изображённому на рисунке, состоит из четырёх стержней. В области перекрытия два стержня (стержни 2 и 4) перекрывают друг друга.
Перекрывающиеся стержни могут быть созданы с помощью высвобождений узлов. Для этого необходимо задать высвобождение узла в узле 2, которое высвобождает стержни 1 и 2. В результате высвобождения узла образуется узел 5, который действует как конечный узел стержня 1 и начальный узел стержня 2. Стержень 1 и стержень 2 жёстко связаны друг с другом.

Теперь можно определить перекрывающийся стержень 4 между узлами 2 и 3. Также необходимо задать в узле 3 высвобождение узла, которое высвобождает стержни 3 и 4. В результате высвобождения узла образуется узел 6, который действует как конечный узел стержня 4 и начальный узел стержня 3. Стержень 3 и стержень 4 жёстко связаны друг с другом.

Чтобы обеспечить передачу конструктивной силы только через пару сил на концах перекрывающихся стержней, необходимо задать условия ограничений между узлами 2 и 5, а также узлами 3 и 6 в высвобождених узлов как тип высвобождения узла.


Моментный шарнир в высвобождениях узлов между узлами 2 и 5, а также узлами 3 и 6 должен обеспечивать передачу нагрузки изгибающего момента между красными стержнями (стержни 1 и 2) и зеленым стержнем (стержни 3 и 4). парой сил на концах перекрывающихся элементов.
Шарнир осевой силы в высвобождении узла между узлами 3 и 6 должен обеспечить передачу нагрузки от нормальной силы только между зеленым и красным рядами стержней для плановой фиксации.
