






Tanto os contatos de superfície quanto o tipo de contatos de superfície podem ser definidos através das entradas associadas no navegador de dados. Os primeiros estão organizados em "Objetos Especiais", e os últimos em "Tipos para objetos especiais". Mais sobre sua definição será apresentado no exemplo na Imagem 1, criando uma conexão entre a Superfície nº 2 e a Superfície nº 3.

A caixa de diálogo "Novo Contato de Superfície" é mostrada na Imagem 2. Como apresentado, o procedimento para defini-lo é bastante simples. O que deve fazer primeiro é inserir os números das superfícies entre as quais o contato está a ser criado. Assim, define uma das superfícies como "Grupo 1" e a superfície paralela como "Grupo 2".
O utilizador também pode usar o botão "Selecionar Individualmente" para selecionar as superfícies graficamente. Esteja ciente de que cada grupo pode também ser composto por várias superfícies. Esses grupos de superfícies não precisam estar exatamente um sobre o outro e não devem estar no mesmo plano.

Uma vez que as superfícies de interesse tenham sido selecionadas, é solicitado a atribuir o tipo de contato de superfície. Se já existir, pode selecioná-lo na lista. Caso contrário, pode definir um novo abrindo a caixa de diálogo associada através do ícone "Criar novo tipo de superfície de contato" (Imagem 2). A caixa de diálogo para definir um novo tipo de contato de superfície também está disponível através da entrada "Tipo de contato de superfície" no navegador de dados (mostrado na Imagem 1).
Assim, o utilizador pode definir o tipo de contato enquanto define o próprio contato (como na Imagem 2), ou pode fazer isso de previamente e depois selecioná-lo na lista na caixa de diálogo "Novo contato de superfície". A última abordagem está apresentada no vídeo deste artigo da base de conhecimento.
Ambas as abordagens levam à definição dos tipos de superfície de contato, como apresentado na Imagem 3. Dado que o tipo de contato de superfície controla as forças que são transferidas entre as superfícies, é necessário primeiro definir as propriedades de contato perpendicular e paralelas às superfícies.
Na lista "Contato perpendicular às superfícies", pode selecionar uma das três seguintes opções: transmissão total de força (isto é, transferência tanto de forças de tração quanto de compressão entre as superfícies); rotura em tração (ou seja, o contato é libertado assim que as superfícies se afastam uma da outra); e rotura em compressão (ou seja, apenas forças de tração são transferidas entre as superfícies).

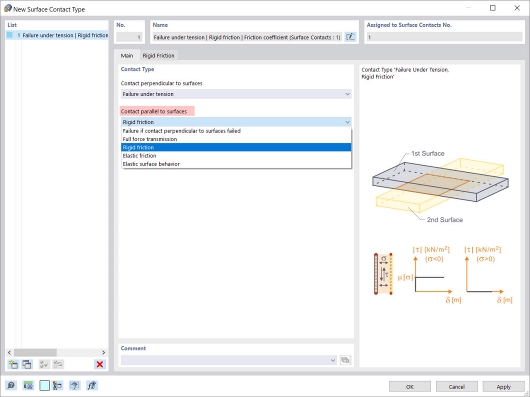
Na lista "Contato paralelo às superfícies", por outro lado, há cinco opções que ajudam a descrever como as forças de corte são transferidas entre as superfícies (Imagem 4). Pode definir, por exemplo, que nenhuma força de corte é transferida se não houver contato de tração ou compressão entre as superfícies selecionando "Rotura se o contato perpendicular às superfícies falhar".
O utilizador também pode escolher "Transmissão total de forças", e todas as forças de corte serão transferidas, independentemente de o contato ser efetivo perpendicular às superfícies. As outras três opções à sua disposição são: atrito rígida, atrito elástico e comportamento de superfície elástica.
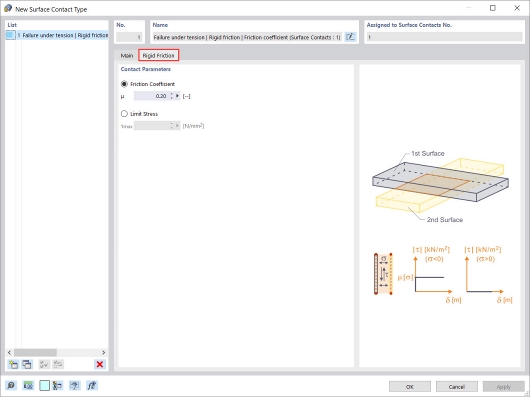
Para fins de completude, ira-se mostrar quais os parâmetros que devem ser definidos ao escolher uma das últimas três opções. Assim, se selecionar "Atrito rígido" na lista "Contato paralelo às superfícies", deve definir o coeficiente de fricção μ ou a tensão limite τmax como parâmetros de contato (Imagem 5). O coeficiente de fricção μ está associado à razão das tensões de corte τ (τ = μ ⋅ |σ|), enquanto τmax é uma tensão limite; uma vez que é alcançada, a tensão não é aumentada ainda mais pelo aumento da deformação, mas permanece constante.
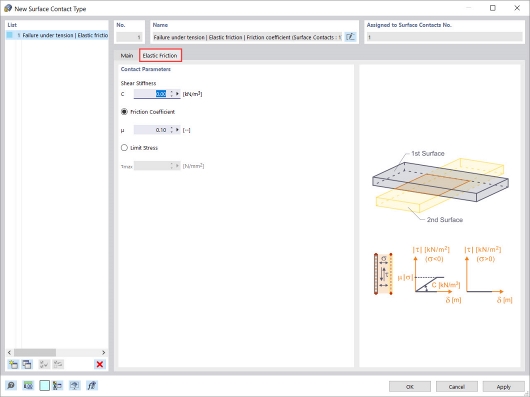
De maneira semelhante, pode selecionar "Atrito elástico" e definir os parâmetros do contato paralelo às superfícies para os quais a força de corte aumenta proporcionalmente à deformação (Imagem 6). A entrada é semelhante à da fricção rígida apresentada na Imagem 5. Já que um comportamento elástico é representado, também é necessário especificar a constante da rigidez ao corte C, que representa a força necessária para mover uma área de 1 m2 em 1 m.
Finalmente, pode escolher um comportamento de superfície elástico e especificar a rigidez ao corte C da mola no separador "Comportamento Elástico" para descrever a propriedade da transferência elástica de forças de corte (Imagem 7).

Neste exemplo particular, onde o contato entre a Superfície nº 2 e a Superfície nº 3 deve ser definido, é escolhida a opção "Rotura em tração" para descrever o contato perpendicular às superfícies, e é selecionado "Atrito rígido" para descrever o contato paralelo a elas. Desta forma, o contato de superfície é definido e apresentado na Imagem 8.

Resumo
Um contato de superfície descreve a ligação entre duas ou mais superfícies paralelas. Para definir um contato de superfície, as superfícies de interesse devem ser selecionadas, e as propriedades de contato devem ser definidas. As propriedades de contato são definidas ao se definir um tipo de contato de superfície que, de fato, controla a transferência de forças entre as superfícies especificadas. Tanto os "Contatos de superfícies" quanto os "Tipos para superfícies" podem ser definidos através das entradas associadas no navegador de dados.
