介绍
您可以使用有限元方法计算静力和超力结构的变形和力。 为了获得背景方程组的解,该解取决于所选的杆件截面,长度和旋转,需要几何约束(例如支座)和荷载技术(例如结构荷载)约束:
[K]∙{u} = {F}
值:
[K]是刚度矩阵,
{u}是节点位移的向量,
{F}是节点荷载的向量。
示例 弹簧的惯性矩K = 3 N/m在外力F的作用下延伸到u = 0.5 m。 由此得出的力F为3 N/m∙0.5 m = 1.5N。
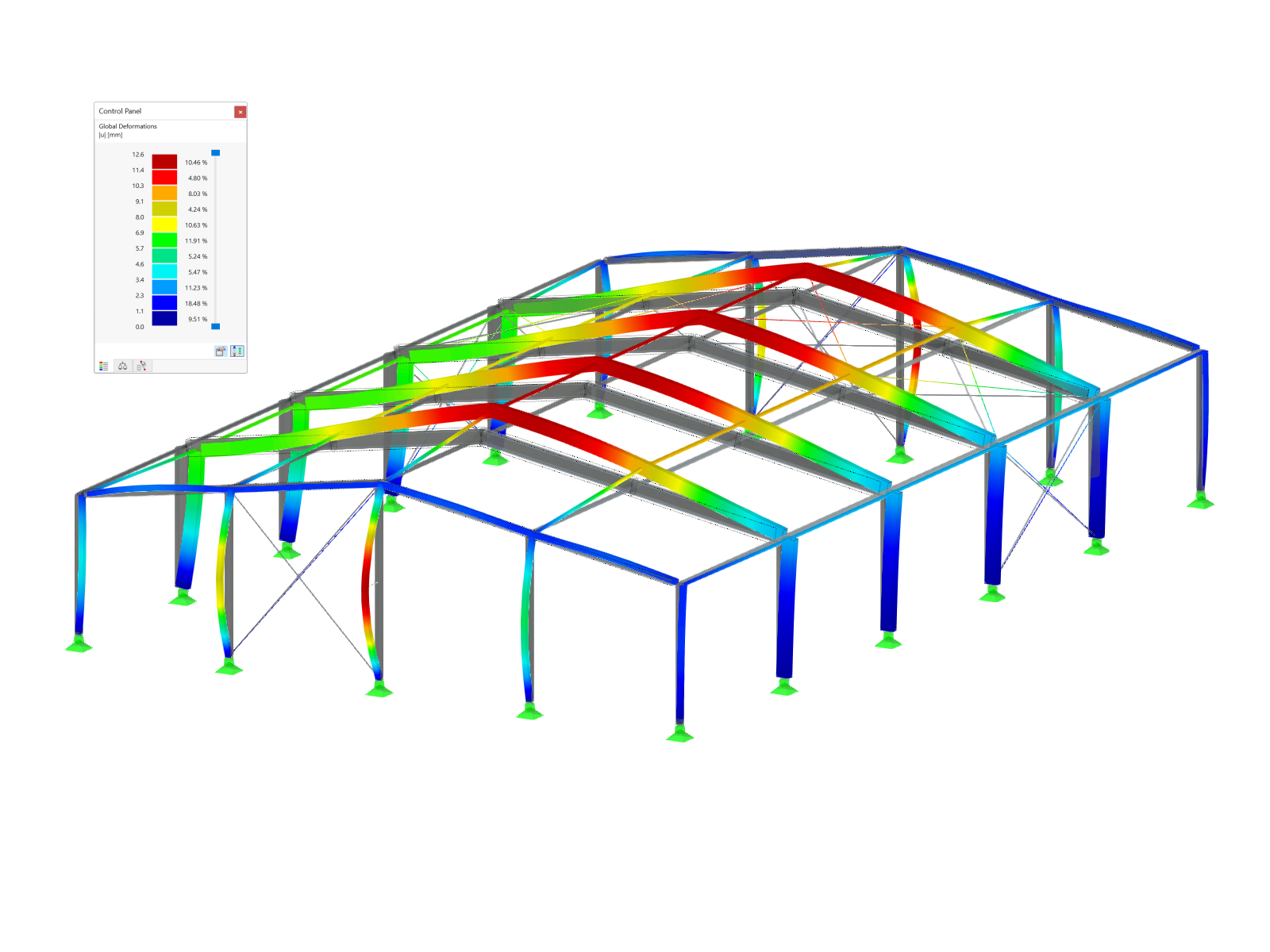
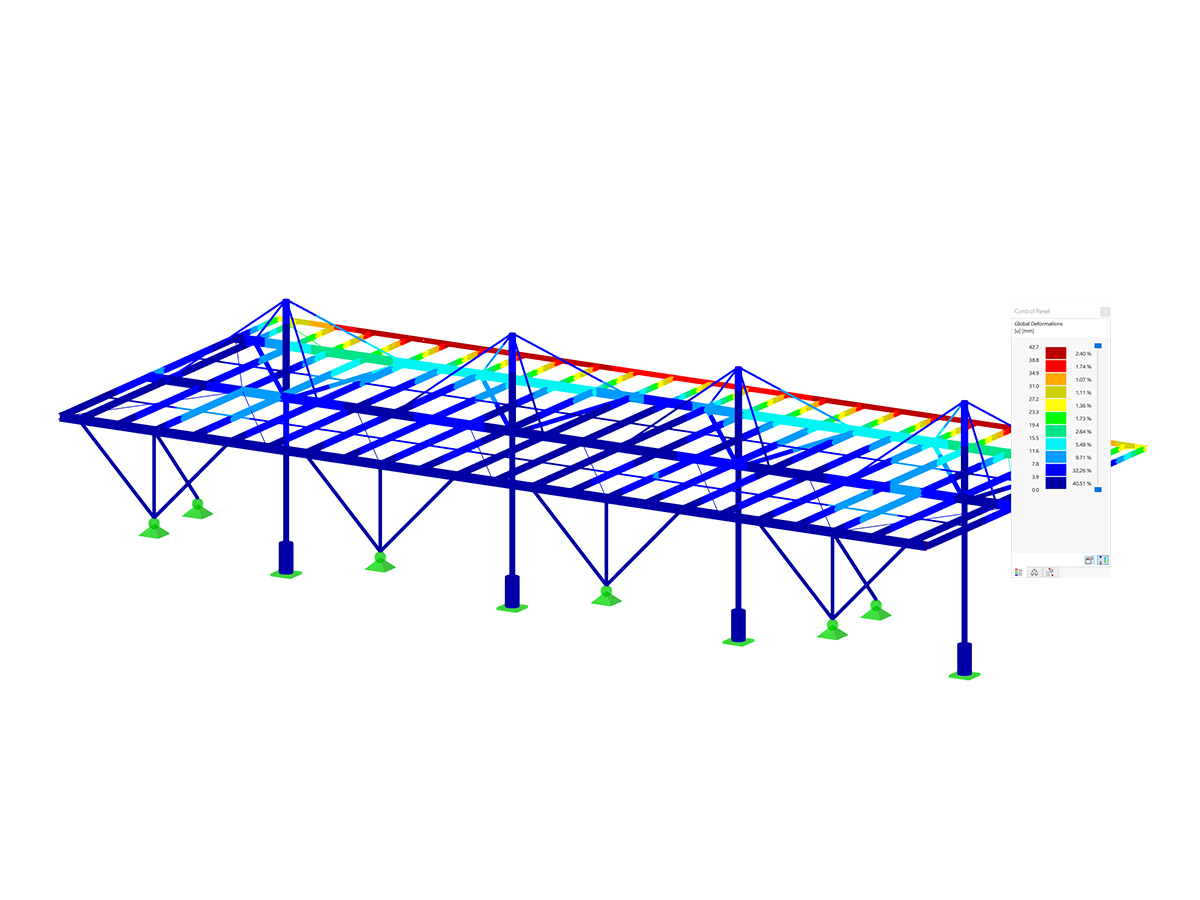
RF‑/STEEL Warping Torsion通过新计算中的7个自由度再次确定了指定杆件组的力和变形。 但是,这意味着没有边界条件的梁结构是不可计算的。 计算需要相应的几何约束形式为支座定义和荷载-技术约束形式为杆件荷载。
因为在各种荷载情况下的几何支座的定义通常是相同的,所以可以在窗口1.7中定义节点支座,在窗口1.13中中定义弹性支座在梁结构的每个节点上。 软件根据在窗口1.1中选择的荷载状况(荷载工况,荷载组合和结果组合)获得对荷载的约束。 因为在RFEM/RSTAB中荷载情况只包含整个结构的荷载,但不是作用在分梁结构中,所以在RF‑/STEEL Warping Torsion。 这些荷载在模块的计算开始时通过RFEM/RSTAB中的全局计算的内力确定。 然后根据翘曲扭转分析,使用在模块中已经定义的部分结构的新的杆件荷载和节点支座来确定新的力和变形。
确定分部结构的杆件荷载
设计软件对每个子结构和相关的荷载情况进行以下描述的检查。
为了确定荷载用于高级分析,该程序使用折弯线的微分方程:
值:
w(x)是位移的函数,
M(x)是弯矩分布的函数,
EI(x)是杆件纵向轴抗弯刚度的函数(弹性模量∙惯性矩)。
从弯曲线和装载(施威德勒定理)之间的关系,该程序可以使用弯曲力矩My(X)中,MZ(x)的导出载荷分布qY(x)时,Qz的 (X):
弯矩M(x)=-EI(x)∙w''(x)
剪力Q(x)=-(EI(x)∙w''(x))'
荷载q(x)=(EI(x)∙w''(x))''

传递函数决定了所提取结构的相应线荷载和分布步骤中的节点荷载。 由轴向力和扭力产生的内力也进行同样的转换,并作为荷载作用在局部结构上。 在该分析中不考虑剪力,因为剪力直接由弯矩推导得出,又由新的等效荷载间接产生。
如果按照用户定义的局部几何约束(支座),那么按照RFEM/RSTAB中的整体结构计算,最后的局部结构将由内力加载。局部结构与整体结构的仿射关系相似。 必须遵循以下定义支座的规则:
- 该支座必须在整个结构中应用仿射效果。
- 局部结构必须是静态确定的或者是超确定的。
- 如果部分结构与整个结构一致,则必须按照与整个结构相同的方式指定支座。
- 部分结构中的中间支座的刚度应与整个结构的刚度相同。
- 对于提取的子结构,支座应在与沿各个旋转方向传递的弯矩相关的切割点处打开。 为了表示由外部荷载引起的轴向力和扭转力的分布,必须在相应的方向上或附近打开任何边缘支座。 在部分结构上的内部约束力仅部分考虑(通过传递函数作为外部荷载)。

该传递函数可以用于荷载工况LC,荷载组合CO和结果组合RC。
概述总结
新的传递函数是用于确定局部结构荷载的复杂工具。 完全集成到RF-/STEEL Warping Torsion中,您可以充分利用此功能。 因此,按照7个自由度计算计算的荷载只取决于要分析的荷载情况。




































.jpg?mw=350&hash=91f398b559b26a6ac36fd7ecdf5e395e7b9b856d)








.png?mw=600&hash=49b6a289915d28aa461360f7308b092631b1446e)